
Well, I've been playing around with (non-operational, conceptual) designs for a homemade CNC machine.
First I made two sliding plates with guides out of Lego with a pedestal for a tool.
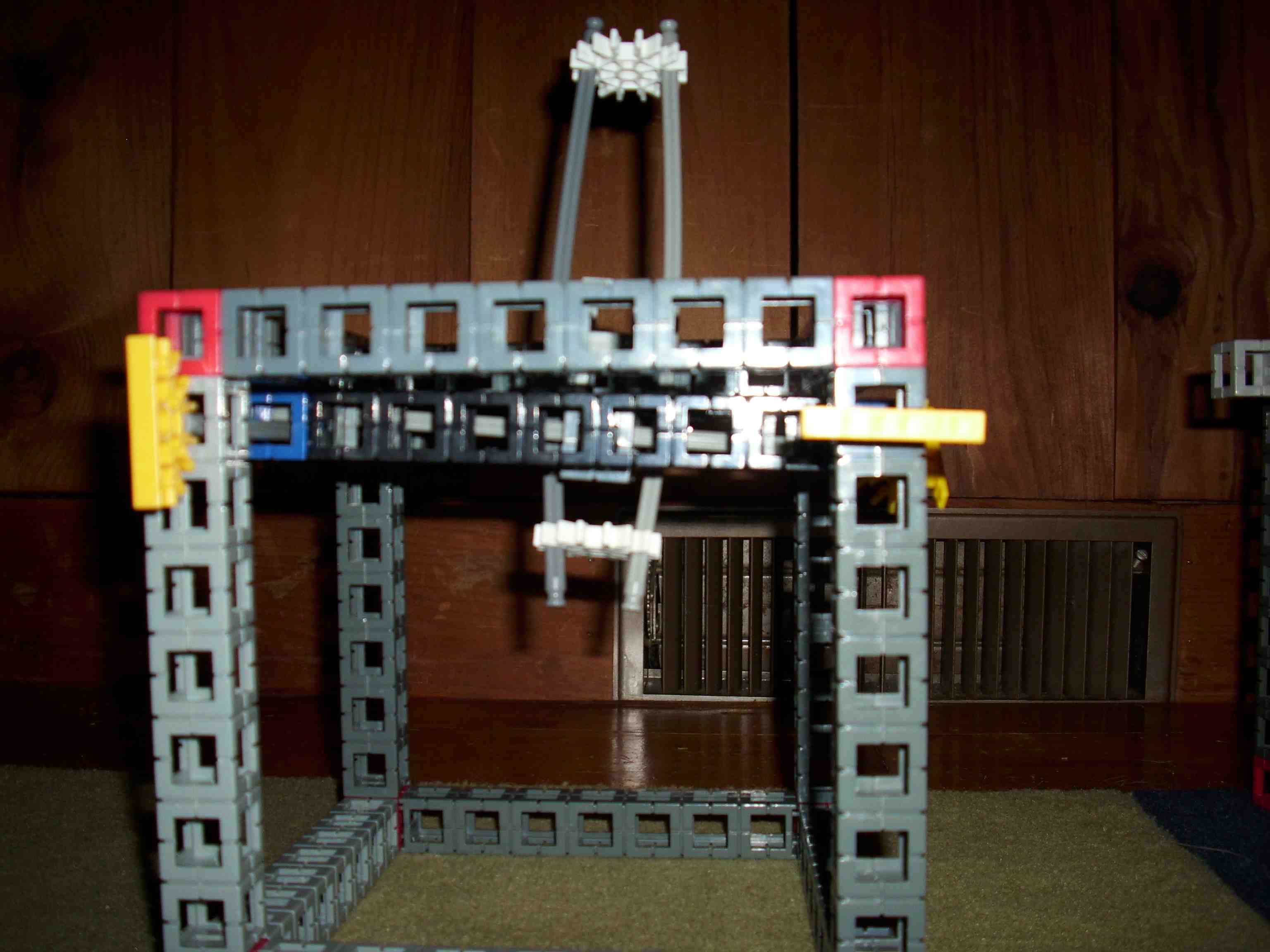
Then I made a cube frame out of Rokenbok with K'nex components as well, which had a sliding carriage at the top, with another sliding carriage within it (so, X and Y at the top), and then a K'nex structure to slide up and down (Z).
I've been thinking of how to make a small device just run by standard cheap RC servos for model planes. So I was looking at this last item.
In part inspired by Stewart-Hexapod platforms, I've long wanted to have a robot that was moved around by three cables. My earlier robots as a teenager used cables to operate the arms. I also built a robotic finger with cables. Cables have lots of problems (stretch, fouling, jamming, etc.) but they are also cheap and easy to design with in some ways. And I've always hoped sensing and computing might overcome some of the limitations of cables for providing true positioning of flexible (flabby) systems.
Now, it is possible to move a robot around with three cables in a triangular space, and even move it up and down some, but the down travel is propelled by the weight of the robot. As I moved the K'nex parts up and down, which were put in such a way as that they slid with difficulty through the Rokenbok, I was thinking that I could have cables to motors on the top part of the cube frame to lift it up. But to go down reliably, there would have to be another set of motors with cables at the bottom of the frame. Moving it around and thinking, it seemed like the cables at the bottom would cut into the work area alot. Maybe not too much to not be useable in additive manufacturing with and extruder, but still unfortunate, especially to do other things like subtractive machining or robotic pick and place. But then, playing with the device some more, moving the K'nex structure (two long rods with a full white connector at the top and bottom) that if I put a second set of motors with cables at the top of the frame, instead of motors with cables at the bottom, then cables could connect to the other end of the K'nex structure (the arm) and pull it down. So, there would be two sets of motors at the top, one to pull the arm down, and one to push it up. Three motors with reels and cables would be needed for each of the two sets as the minimum for positioning (more could be used, of course, like four to go with a square frame). Then, I could dispense with the top carriage arrangement entirely.
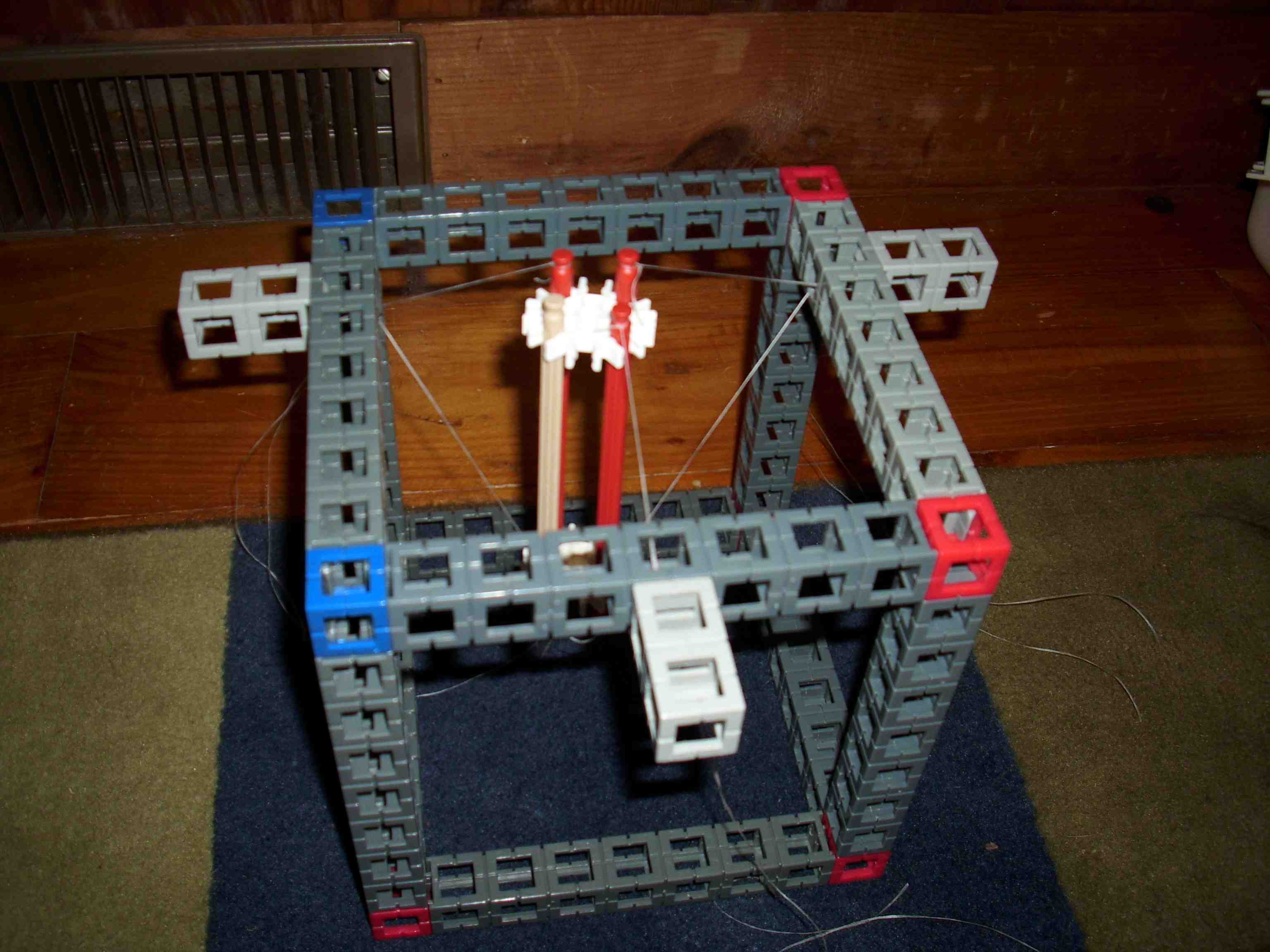
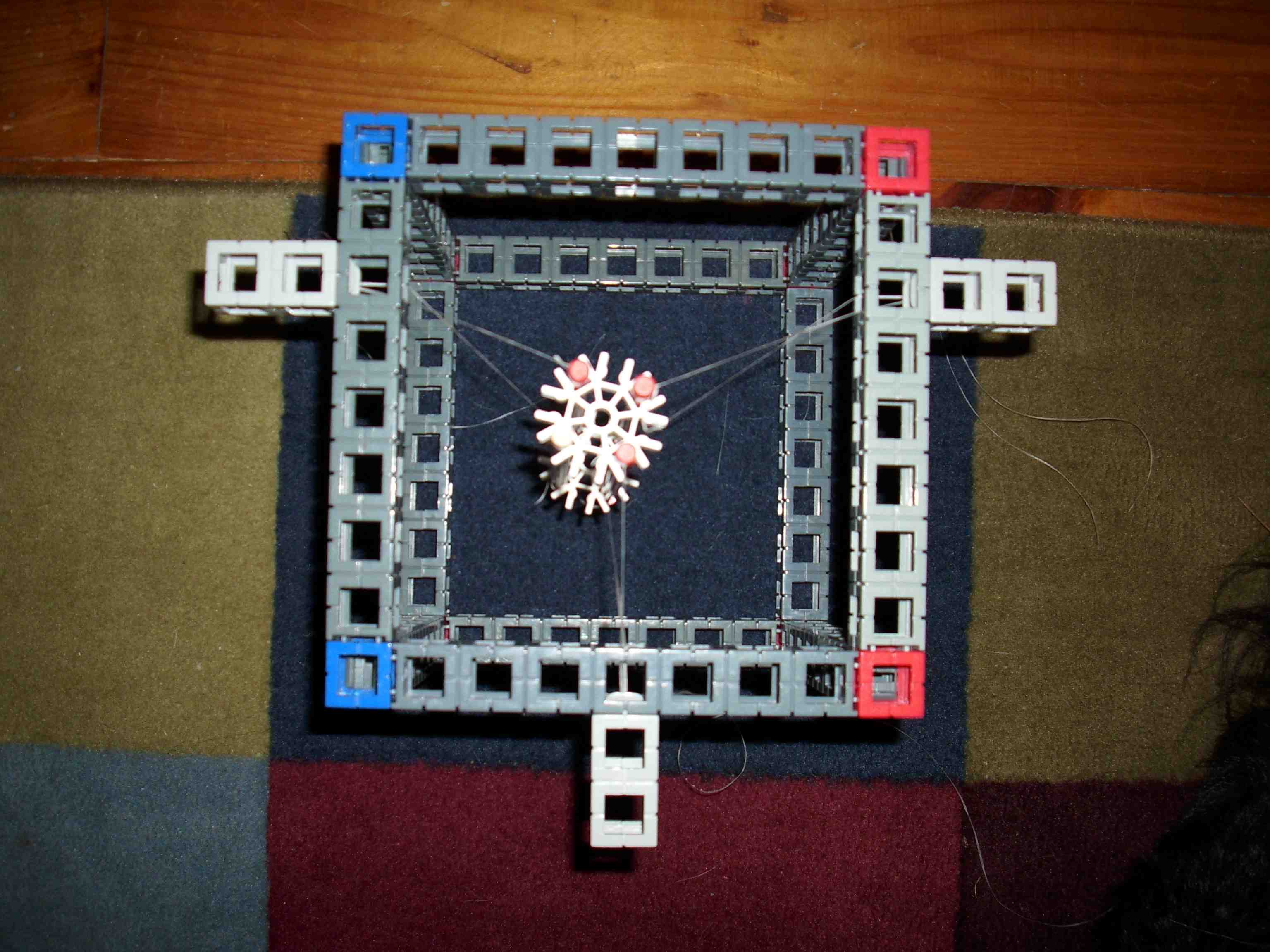
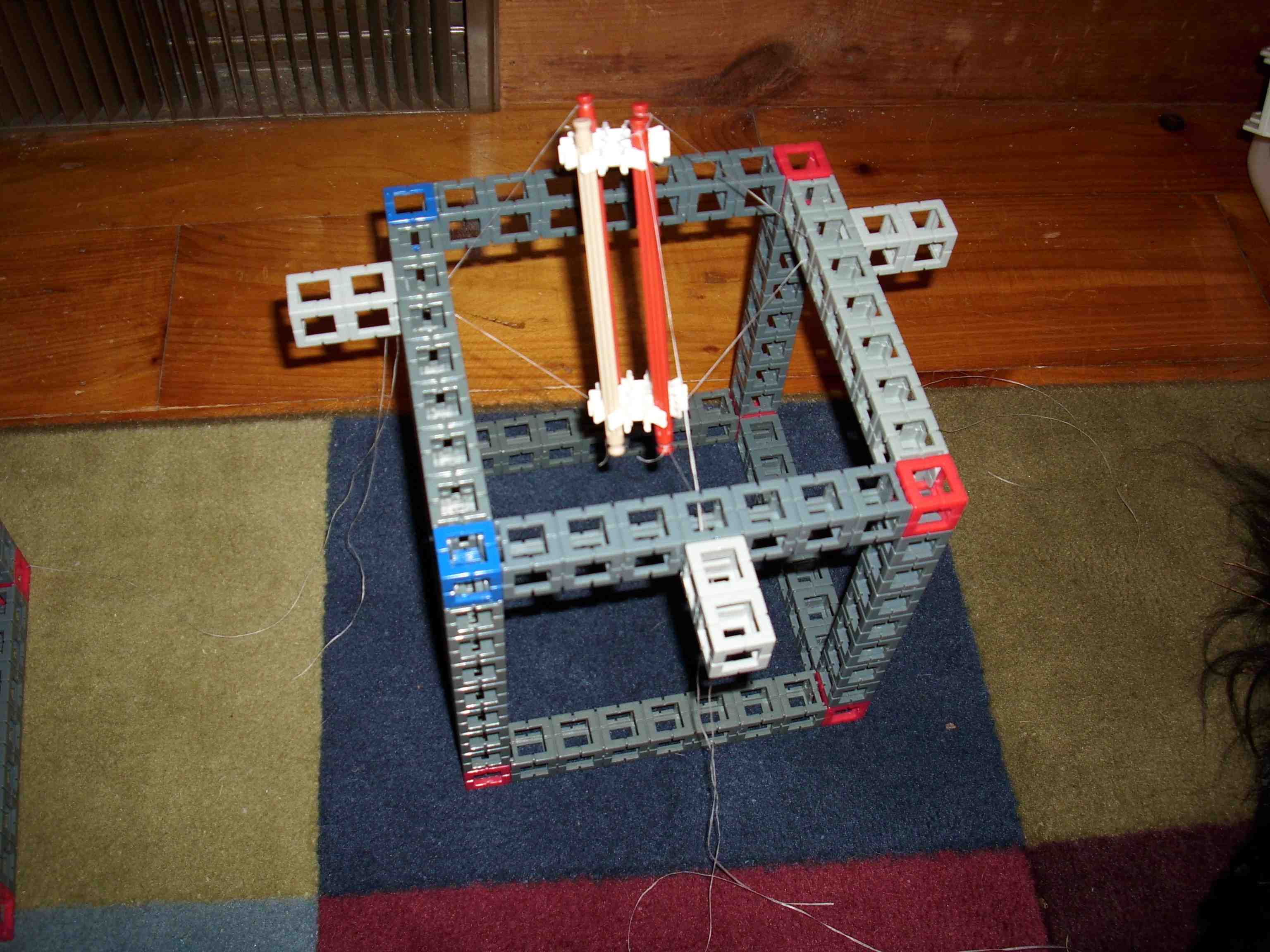
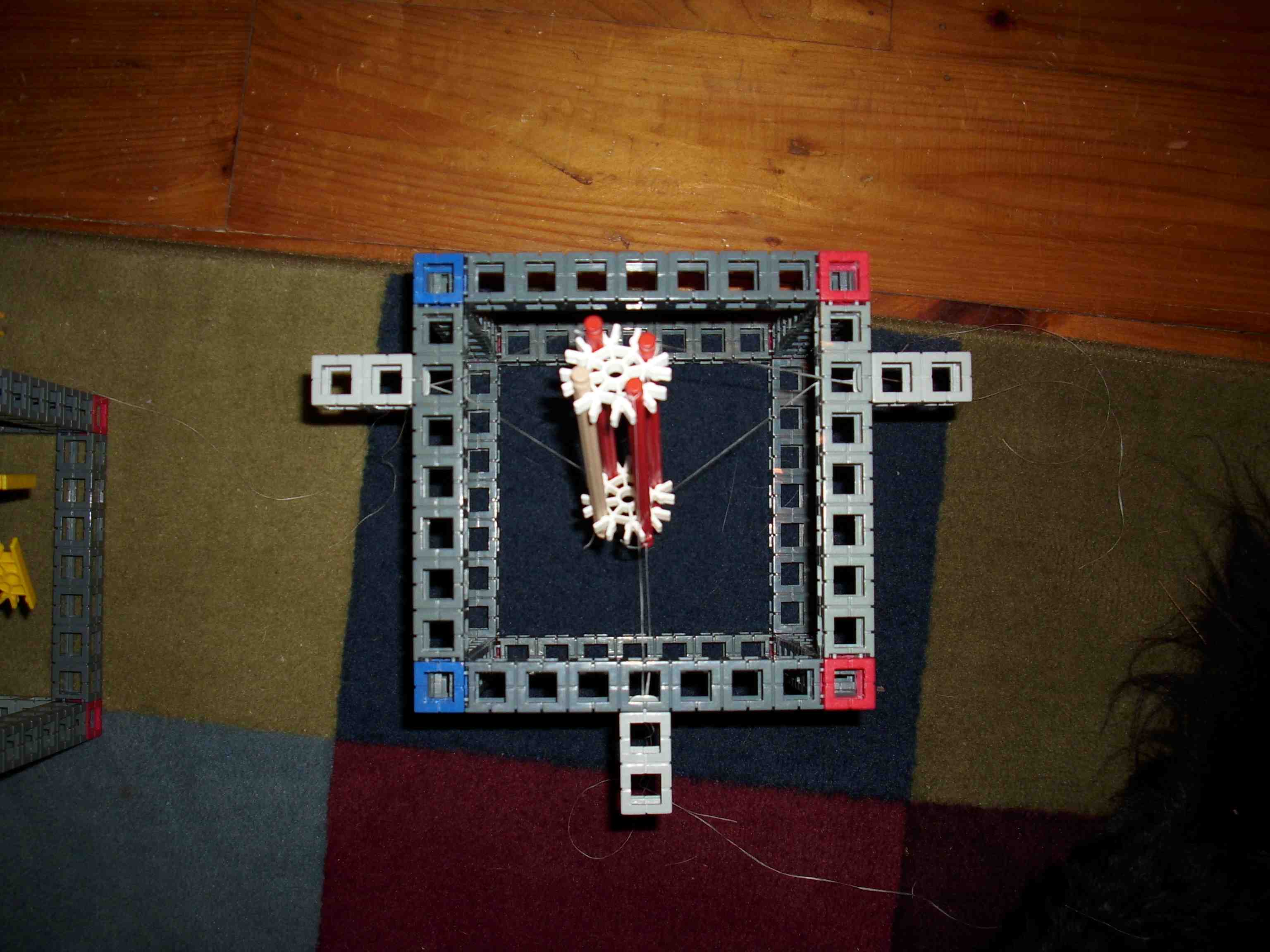
So I built another Rokenbok frame and another K'Nex structure (arm segment), and used dental floss as the cable, held in place by three Rokenbok two-length section my child got for me. So, there was a tensegrity robot.
Now, one could have cameras focused on different parts of the structure to determine how the end sections of the arm segment were moving. And one could use some sort of acoustic ranging system with microphones on the frame and noise makers on the arm segment (or vice versa) to determine the position of the arm fairly precisely and use that as feedback to the motors pulling on the cables. One might use other sensors as well, ideally something like an idler pulley to sense tension on the cables (or cables that changed color with tension?). One might even have an extra fast servo on each cable idler pulley to adjust the tension quickly, like to compensate for vibration.
Putting six cables on each of the top and bottom (might be possible to get by with less on one side) would allow one to orient the end of the arm segment in terms of rotation. These might be needed as the current design with three can vibrate easily along the long rotational axis.
Like with regular Hexapod/Stewart platforms, one could nest these one after the other for increased reach.
Anyway, just wanted to document the idea to prevent future patenting of this basic idea.
This may well not be a new idea; it is just new to me. The key idea was seeing that with a long arm segment that extended above the frame was a feature, so it was a case of literally "thinking out of the box". :-)
Assuming this all worked well, assembling a RepRap or Fab@Home like device would consist of putting together the sparse frame, adding on the motors in, say, six clusters at the top of the frame (two motors with cables on each cluster), wiring up the electronics, positioning several sound generators and microphones, positioning some cameras and other sensors, and then calibrating the whole thing. Easier said than done, of course. :-)
But this would give you a very cheap device that could do a limited form of six axis milling within a limited volume. :-) (The angles would be limited to a narrow range from above, so no side drilling, unless maybe you hooked two of these devices together somehow, or otherwise turned the part.)
For small machines, their may not be much advantage of this system over a CupCake CNC design. But for large machines (the kind to work on room or house sized volumes), there may be a real advantage (pun intended) in using reels and cables and having a simple frame, as you can dispense with sliders and precision alignment, and so on. With the acoustic system, or with visual calibration with cameras, or with laser measuring, if you could somehow compensate for stretch and vibration in the cables, you might be able to maintain very high precision across a house-sized volume.
A variant of this would use Nitinol wires instead of cables and motors, if you were patient for the slower speed.
OK, pics or it did not happen: :-)
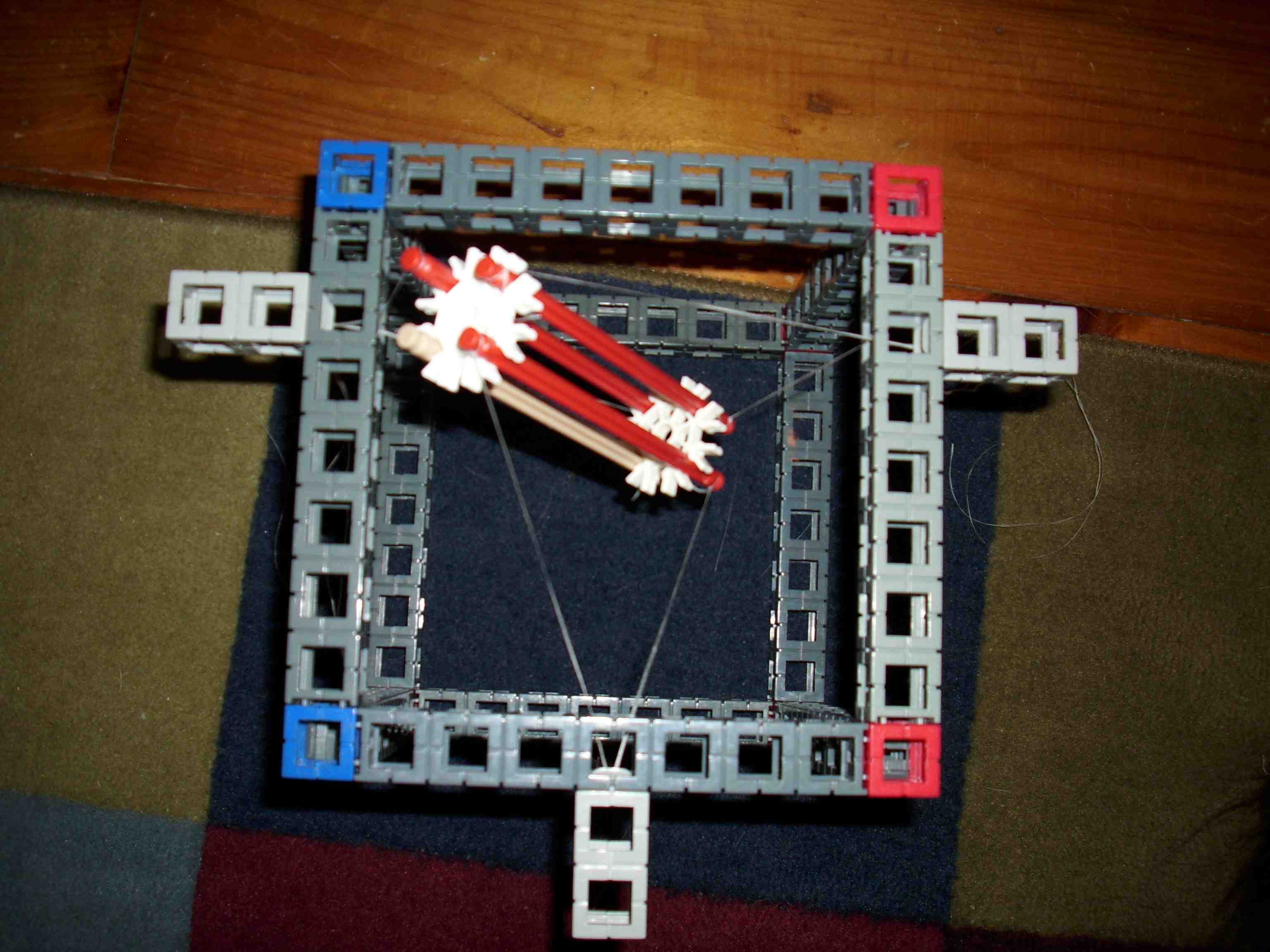
The first cartesian robot next to the tensegrity robot:
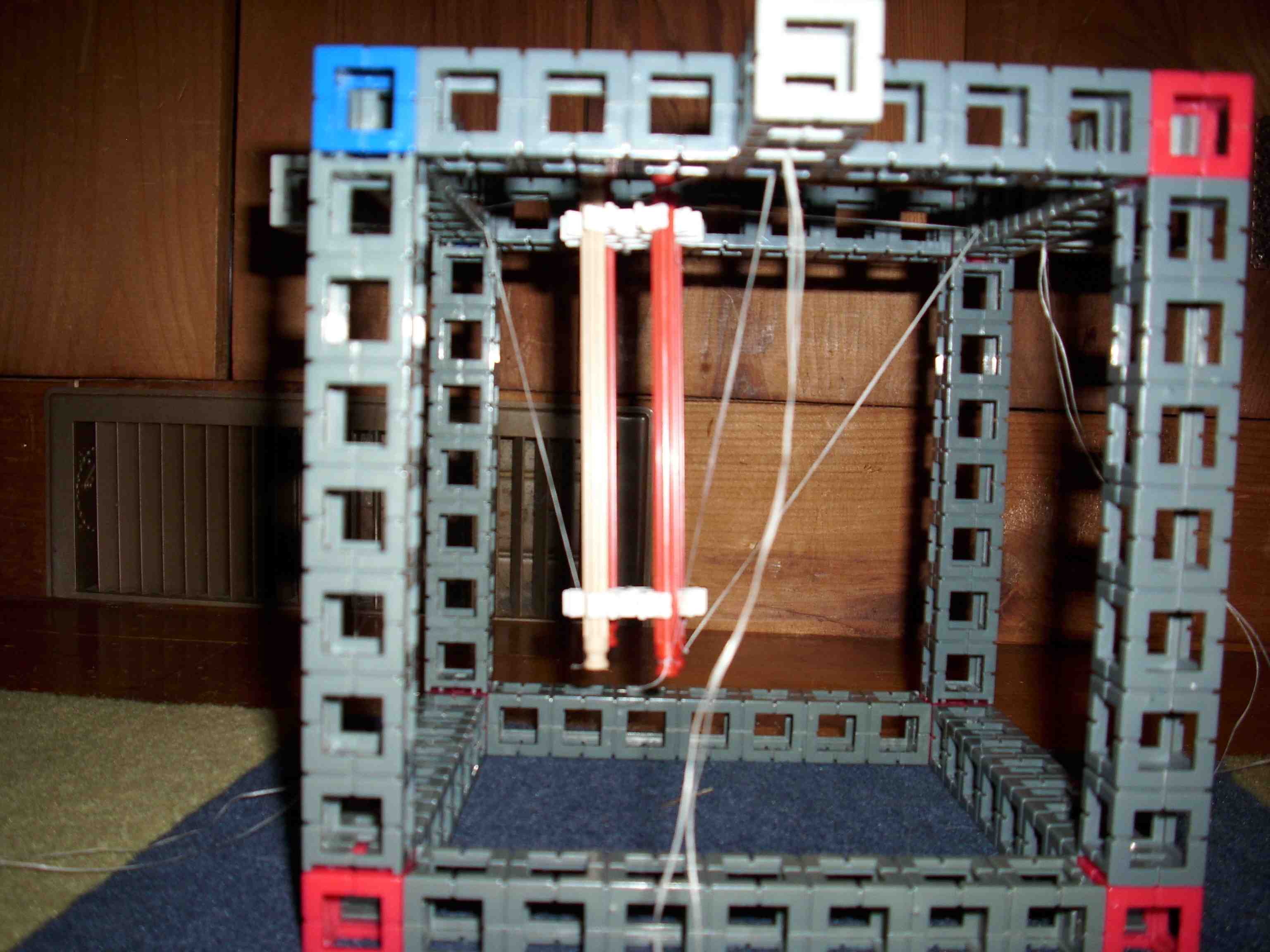
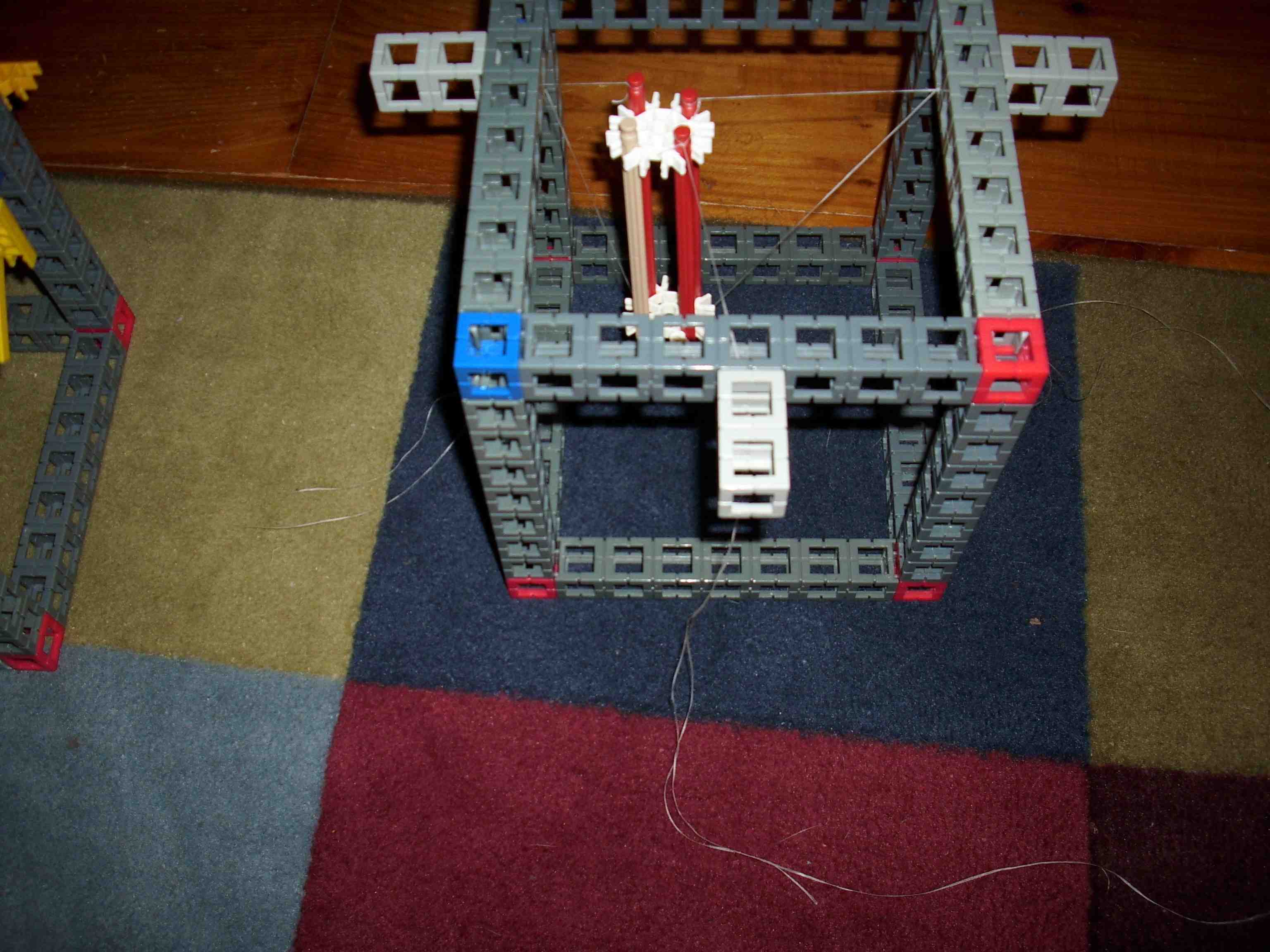
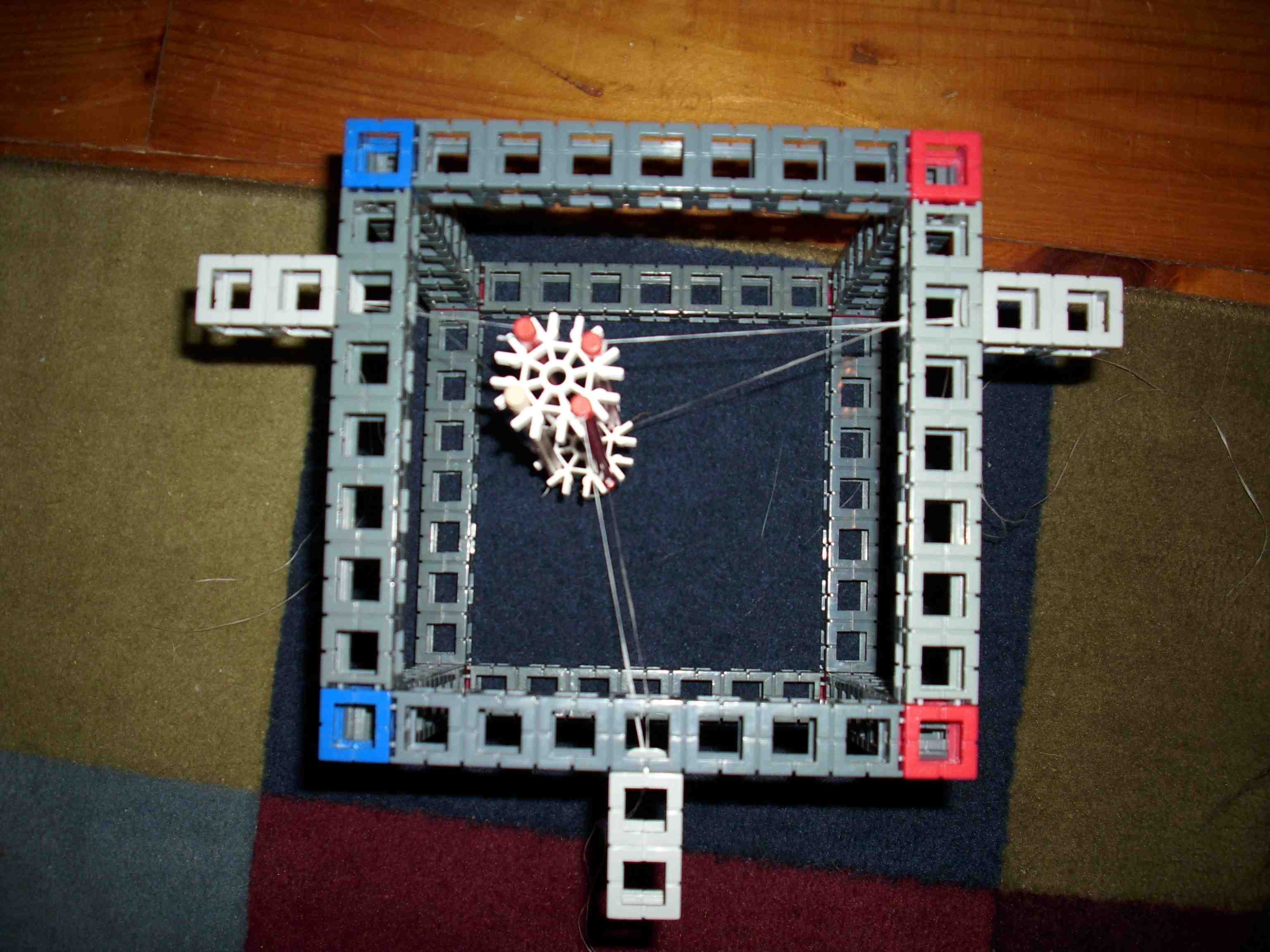
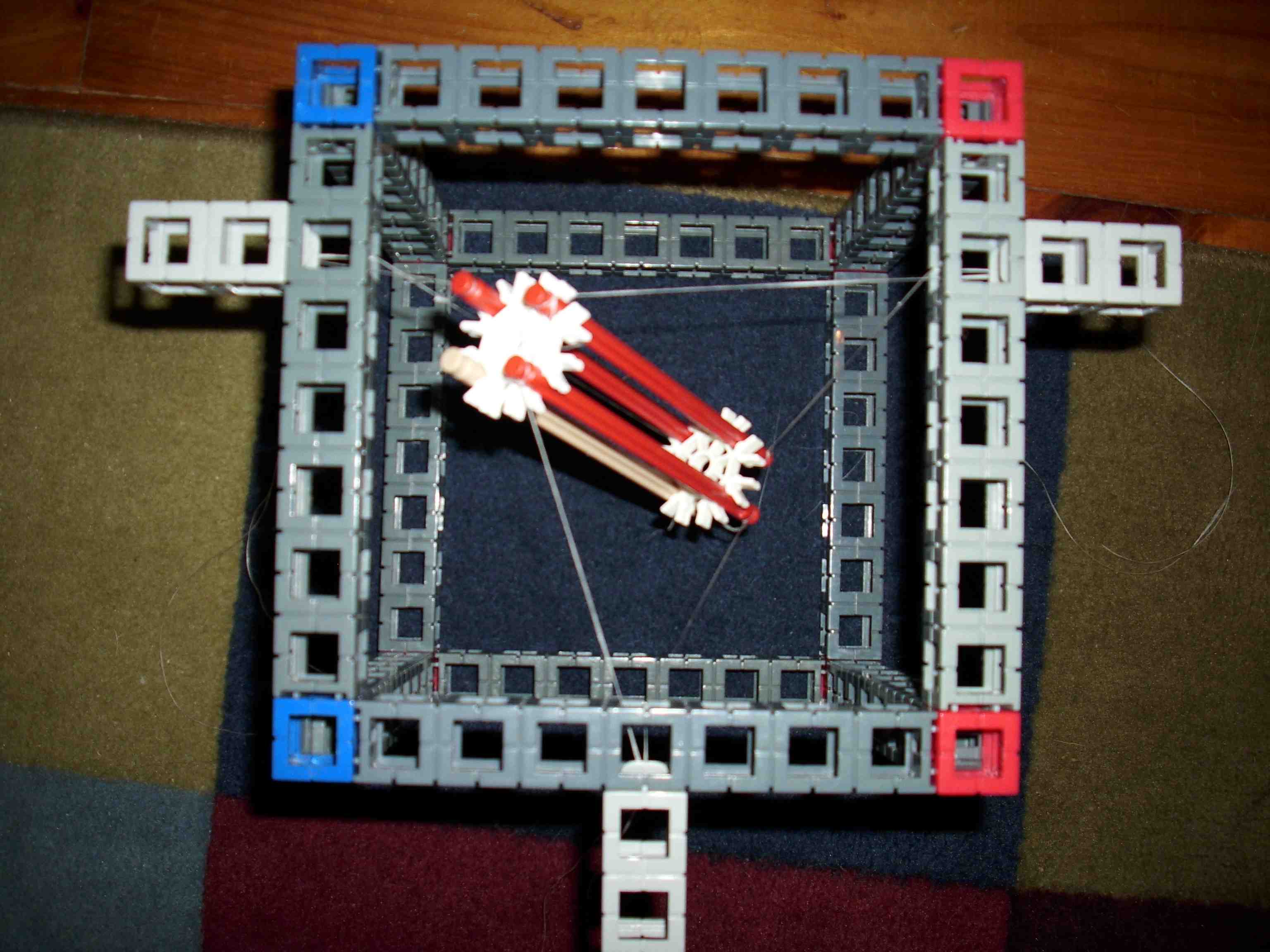
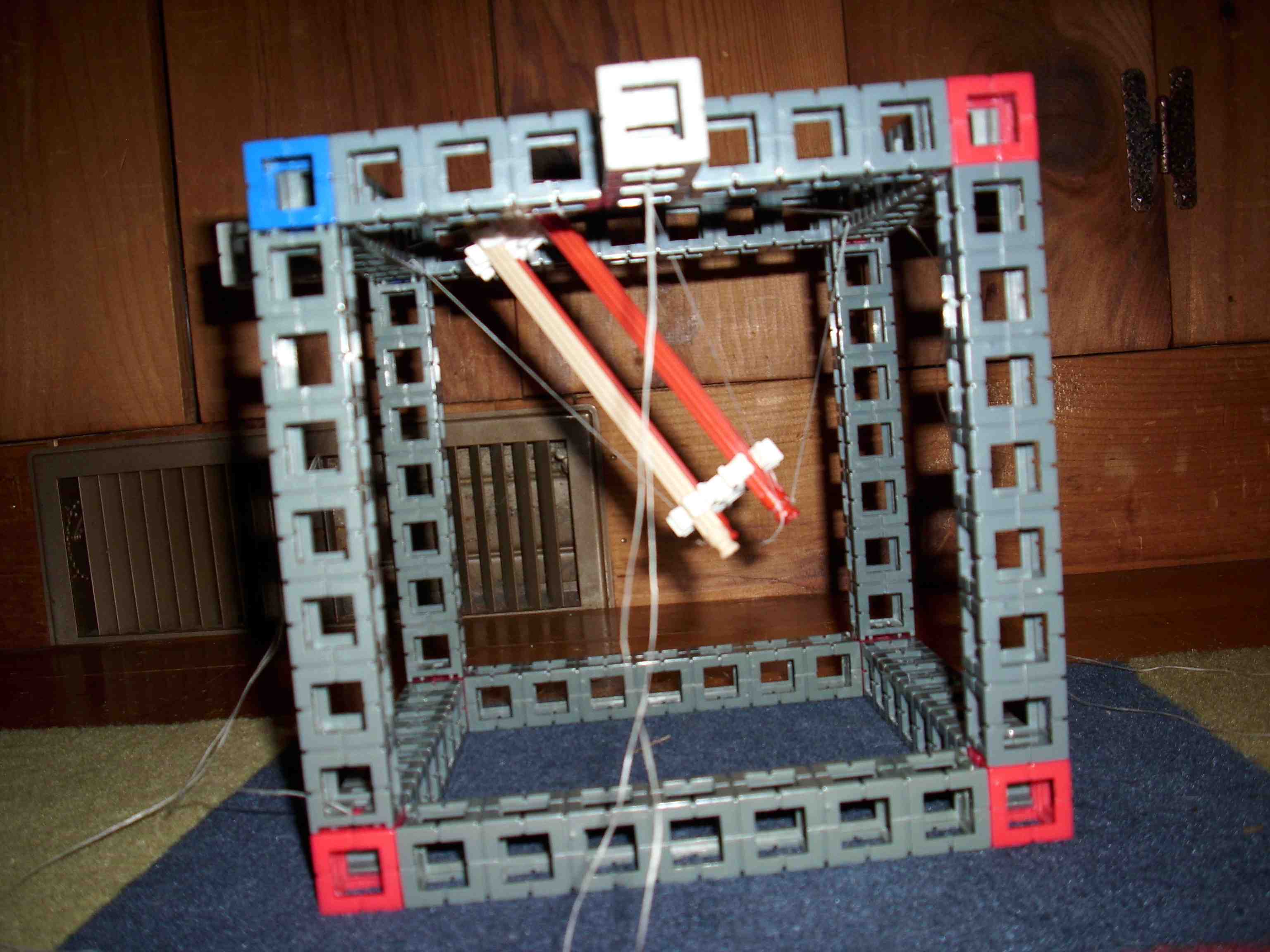
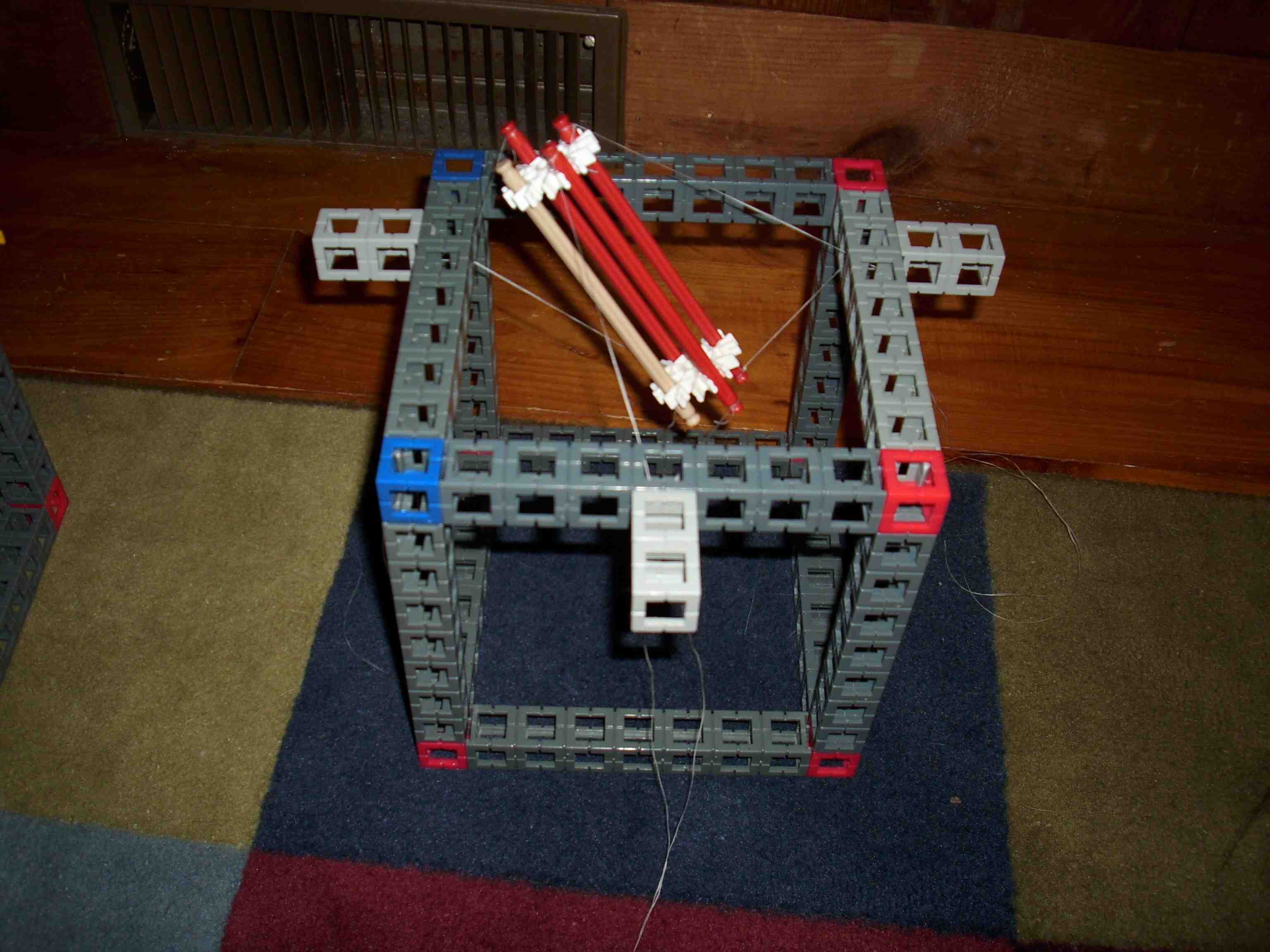
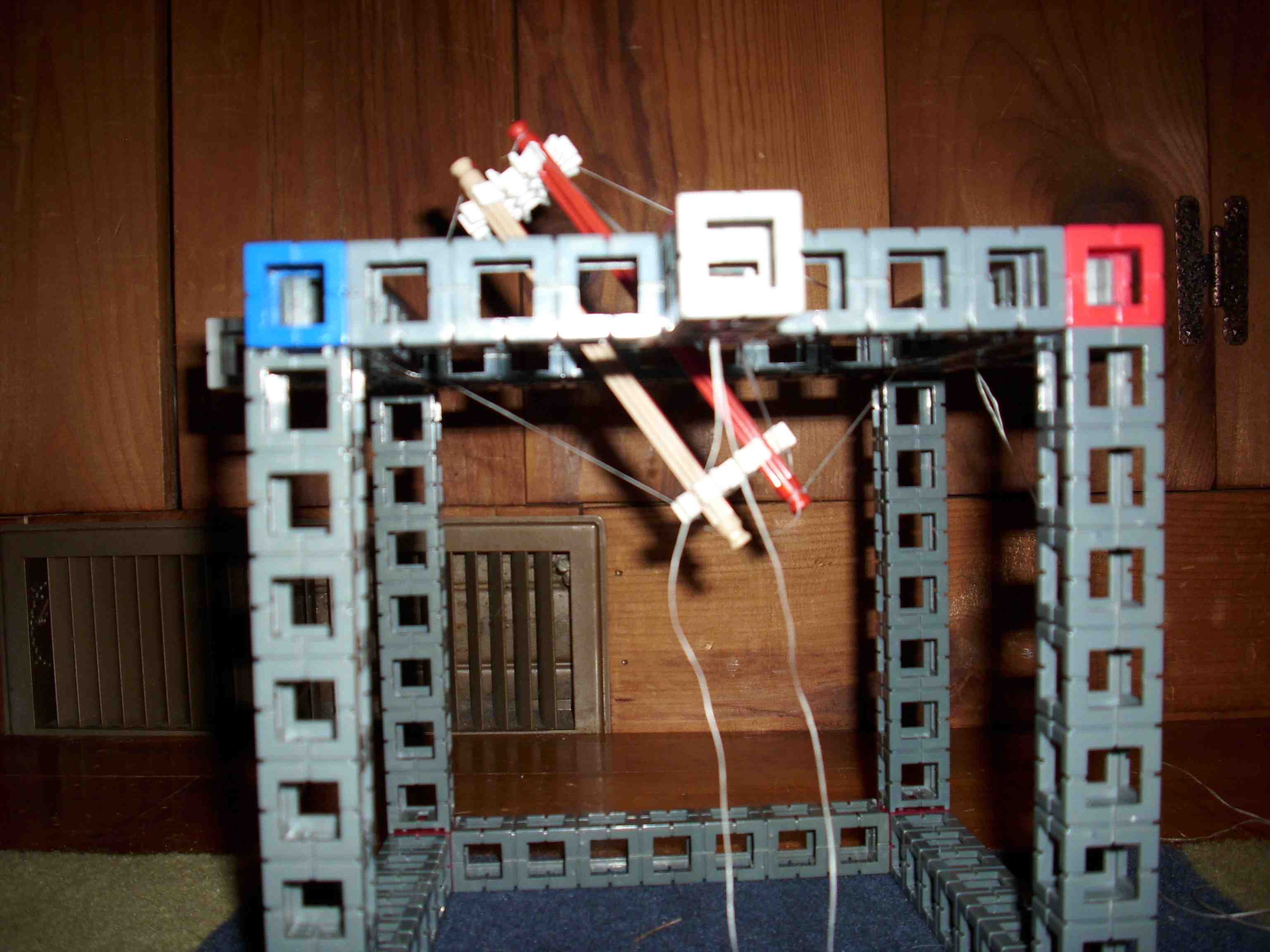
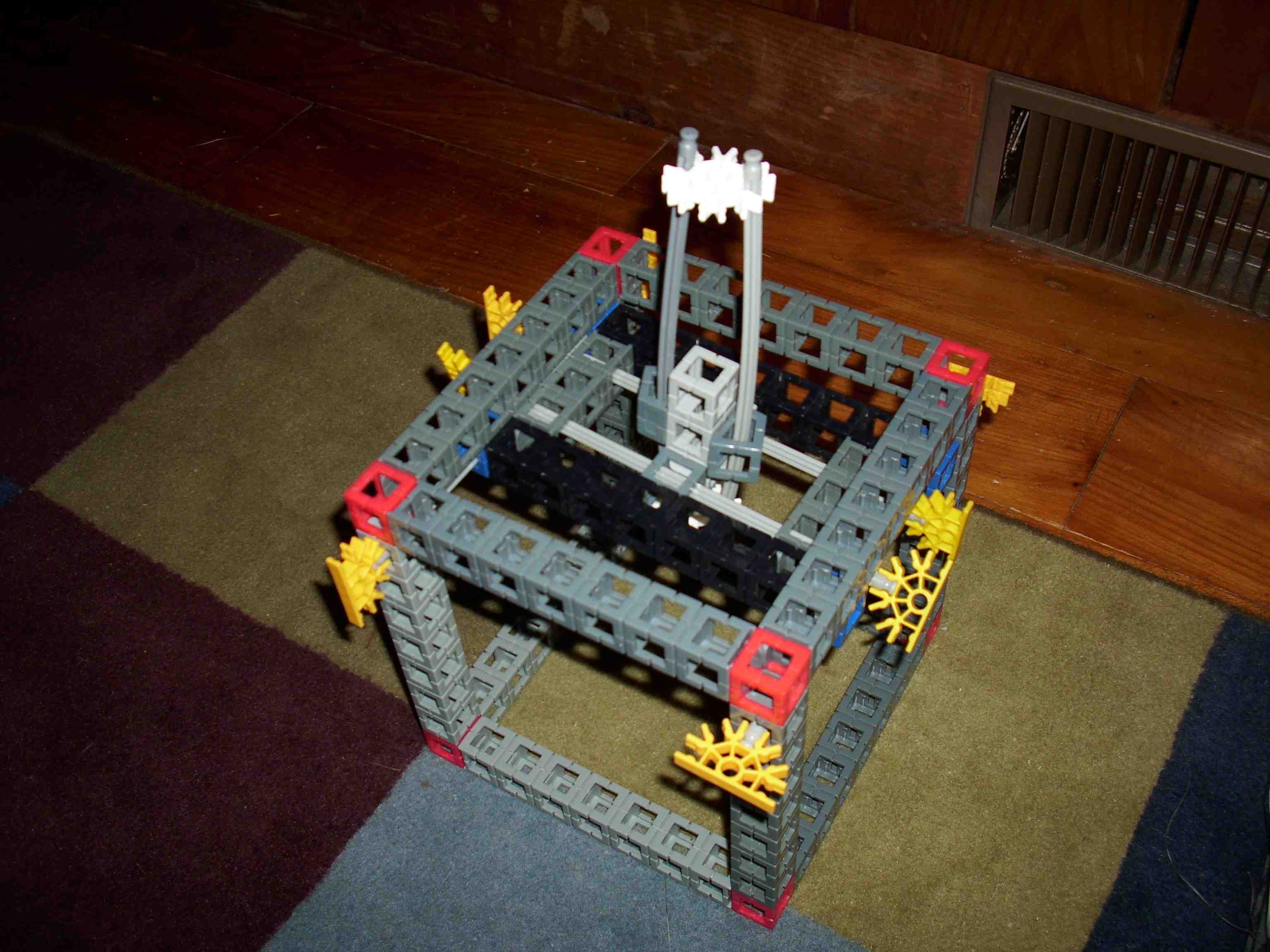
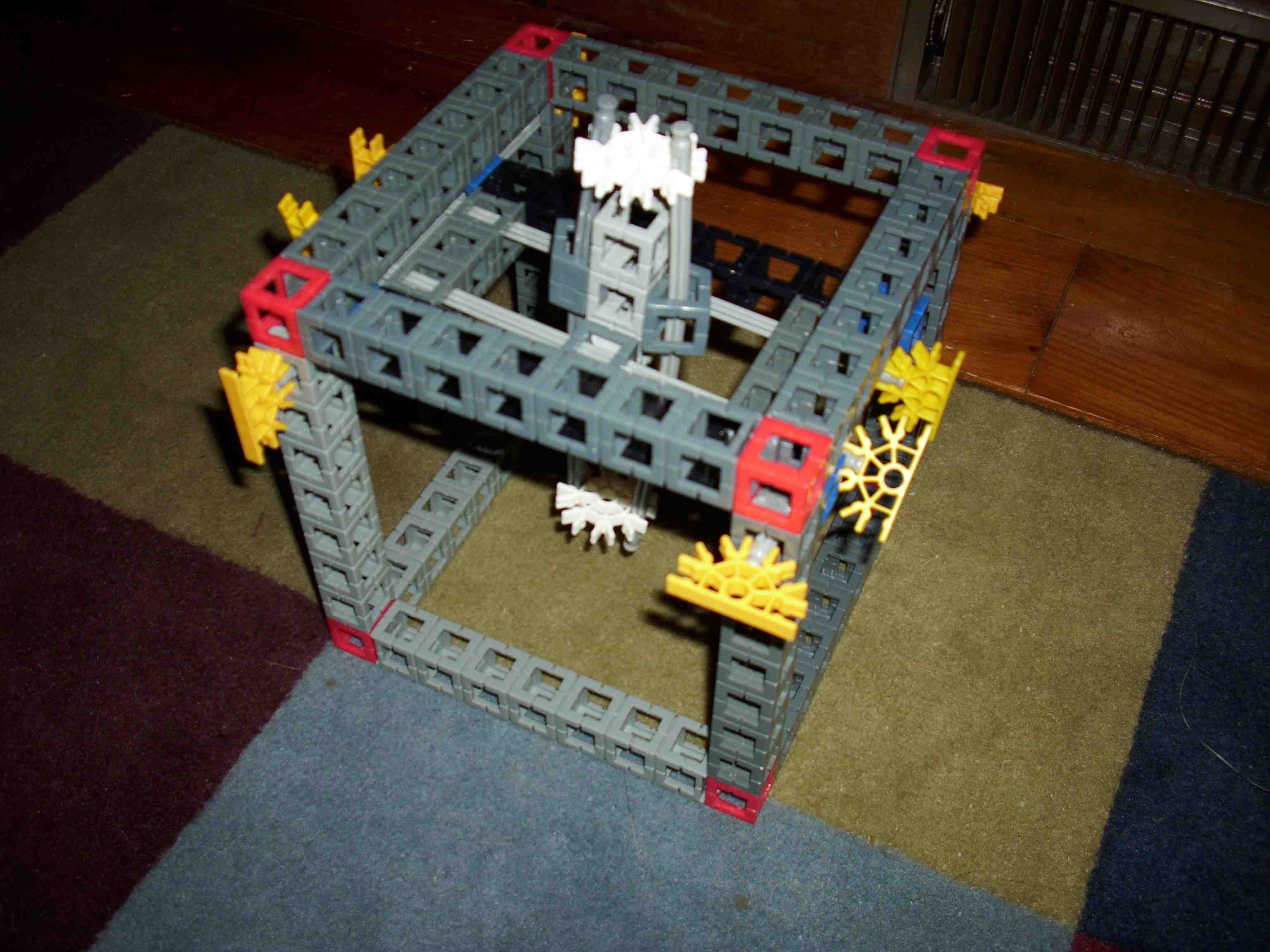
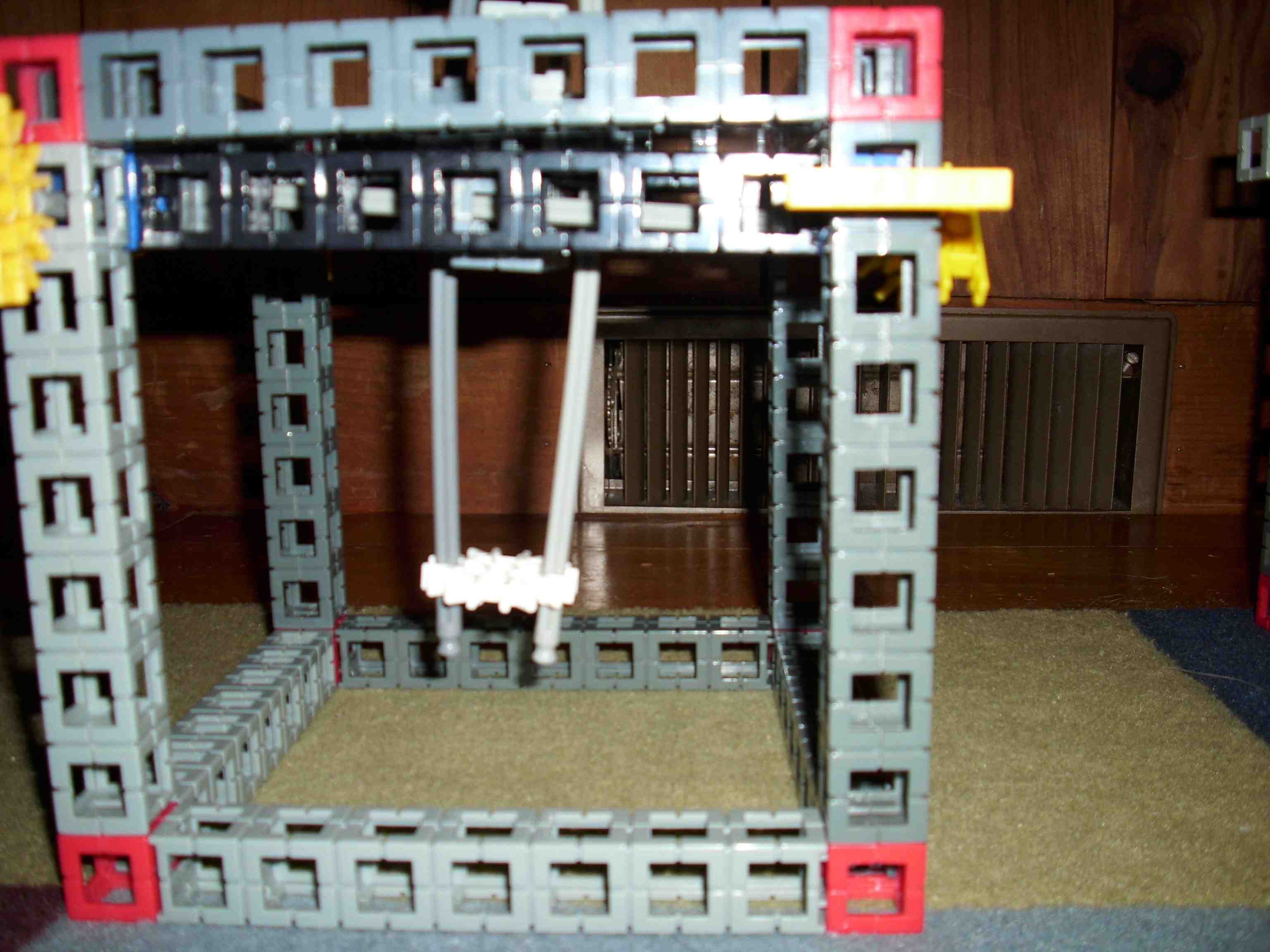
The tensegrity robot in different poses, multiple images of some poses from different views:
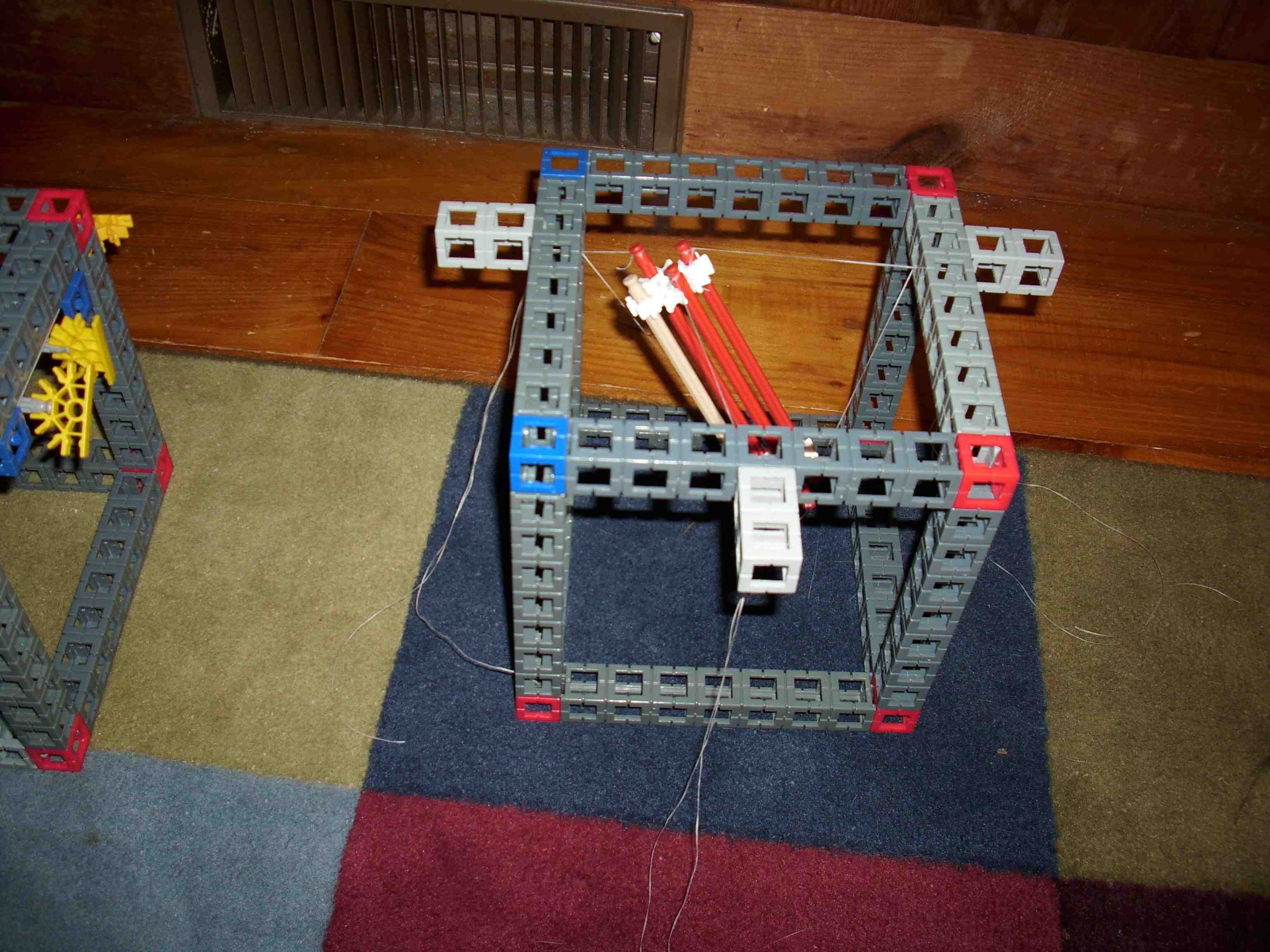
More of the cartesian robot precursor:
(Please excuse the dog tail visible in some of the pictures.)
--Paul Fernhout
June 8, 2009